BLT BUS
Stadtbus Modell von der Firma Rietze.
| Länge: |
136 mm |
|
| Breite: |
30mm |
|
Höhe: |
35mm |
|
| |
|
|
| Motor & Getriebe: |
7 mm Motor mit M-G48F Getriebe |
|
| Akku: |
2 x 1,2 NiMH (2,4 Volt) |
|
| LED: |
20 Stück |
|
| Decoder: |
DC05-SI |
|
| Hallsensor: |
Bestückt (Bus Automatik) |
|
| Magnet: |
Bestückt (Fahrzeugerkennung) |
|
| Reed: |
Bestückt gemäss Faller System |
|
| Updatebuchse: |
ohne (Decoder ist einfach zugänglich ohne das Gehäuse entfernen zu müssen) |
|
| Ladebuchse: |
Bestückt |
|
| Hauptschalter: |
Bestückt |
|
| Umbauzeit: |
über 35 Stunden |
|
| Eingestellte CV Werte |
Nur die verstellten Werte. Die restlichen entsprechen den Werkseinstellungen. |
|
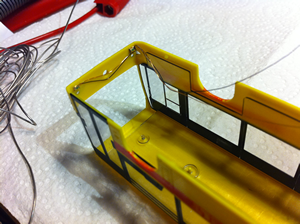
Bild des Original Modells.

Nach dem realisieren des Traktor Projektes stiess ich rein zufällig auf dieses Modell. Da es sich um ein Bus handelt den es
tatsächlich gibt und praktisch bei uns vor der Tür hält, musste ich dieses Modell haben. Nach dem Traktor "Virus" war mir
bald klar das sich dieser bewegen soll. Das dabei die Lichter funktionieren müssen versteht sich von selbst. Und
wieder mal landete ich im Netz. Mittlerweile wusste ich dass es Lenkachsen für den Einbau gibt sowie auch entsprechende
Getriebe mit Motor. Nach langem hin und her entschied ich mich für das DC Car System. Den dies bietet nicht nur die
Abstandsteuerung sondern auch die Busautomatik. Bevor es hier jetzt aber los geht, muss der Strassenbau erwähnt werden.
Diesem Thema habe ich ein eigene Rubrik gewidmet. Das Problem war, dass ich keinen vernünftigen Platz habe
für anständige Radien oder Wendemöglichkeiten. Ähnlich wie beim Traktor auch schon. Nur das hier noch ein neuer Faktor dazu
kam. Der Bus soll Automatisch blinken und in der Busbucht halten und wieder losfahren.
Der Decoder DC05-SI hat dies onboard, braucht aber da gewisse Voraussetzungen. Da später auch andere Fahrzeuge
auf derselben Strasse fahren sollen, muss die "Strasse" wissen das gerade der Bus darüber fährt, damit eine Weiche
den Bus in die Bucht umlenken kann. Zusätzlich musste aber der Bus wissen, dass er jetzt rechts blinken muss und etwas
langsamer fahren soll. Natürlich muss er auch wissen wann ganz anhalten. Dies ist möglich wenn der Bus einen Hallsensor
montiert hat. Dieser detektiert ein in der Strasse eingelegter Magnet und meldet dies dann dem Decoder. Der wiederum
steuert dann die Busfunktionen wie Geschwindigkeit und Blinker. Dazu gehört auch dass die Bremslichter aufleuchten wenn
angehalten oder einfach nur die Geschwindigkeit gebremst oder reduziert wird.
Alle die mehr über das DC Car System erfahren wollen können dies auf der Page des Herstellers und Erfinders. Der Link
befindet sich in der Rubrik Link . Hier geht es in erster Linie um den Umbau des Buses.
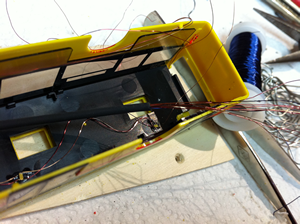
Das Modell steht auf dem Tisch und als erstes wird es zerlegt. Dabei müssen Überlegungen angestellt werden, wie
zum Beispiel die Drahtverlegung aussehen soll. Wo kann der Akku platziert werden und wo die Elektronik ? Nicht
vergessen den Reedschalter, Hallsensor, Ladebuchse, Updatebuchse, Magnet und Hauptschalter.
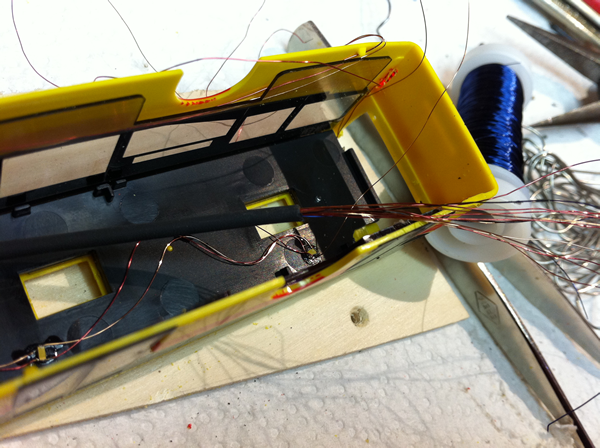
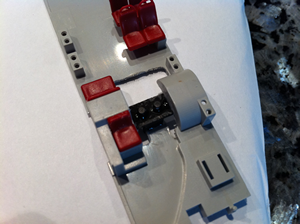
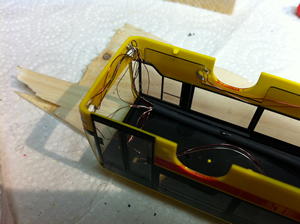
Hier die Carosserie ohne innereien.


Die kleinen Öffnungen, unterhalb der Lichter, sind die Öffnungen für die Nebelscheinwerfer. Diese werden die Infrarot
Empfänger beherbergen und kein Licht abgeben.
Über diese "Phototransistoren" werden dann die Infrarot (IR) Sender
empfangen und verarbeitet. Gleichzeitig empfängt darüber der Decoder auch die IR Informationen des vor-
ausfahrenden Fahrzeuges und verhält sich dann entsprechend. So wird der Abstand gewahrt. Hält das vordere
Fahrzeug, zum Beispiel an einer Ampel, hält auch das hintere. So sind Kolonnen möglich. Einfach Genial.
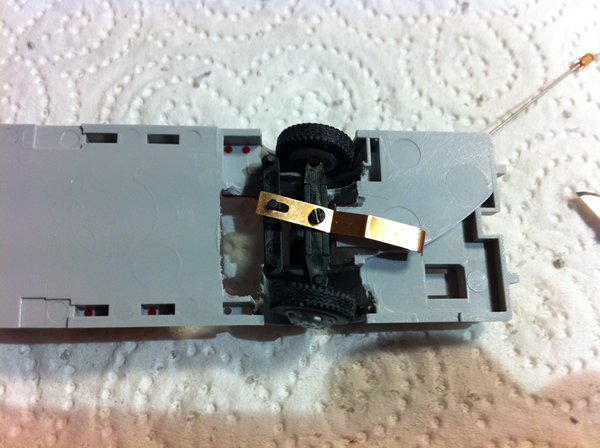
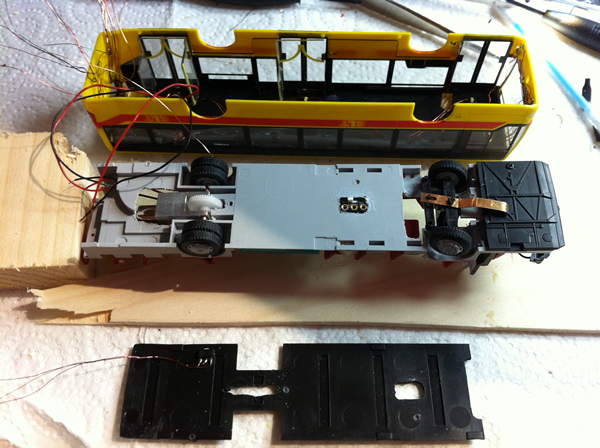
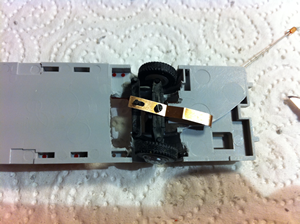
Als nächster Schritt wird die Mechanik eingebaut und angepasst. Dabei muss einiges ausgefräst werden. Braucht viel
Mut und Konzentration. Denn weg ist weg!
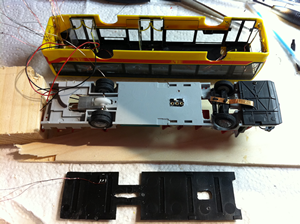
Als erstes der Antrieb. Das Modell besteht aus einer Grundplatte die hier entfernt wurde. Dann das eigentliche Chassis.
Die Halterung für das Lenkachse ist bereits eingeklebt.
Bitte Bilder anklicken für mehr und grössere Bilder.
Allfällige Kommentare beachten.

Gleichzeitig wird für die Lenkachse ausgefräst. Dabei ist es sehr wichtig darauf zu achten das die Räder in jeder
Stellung völlige Bewegungsfreiheit haben. Die Reifen dürfen niemals irgendwas berühren.
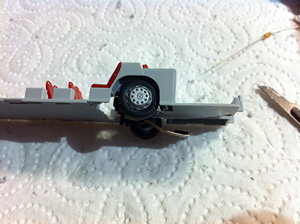
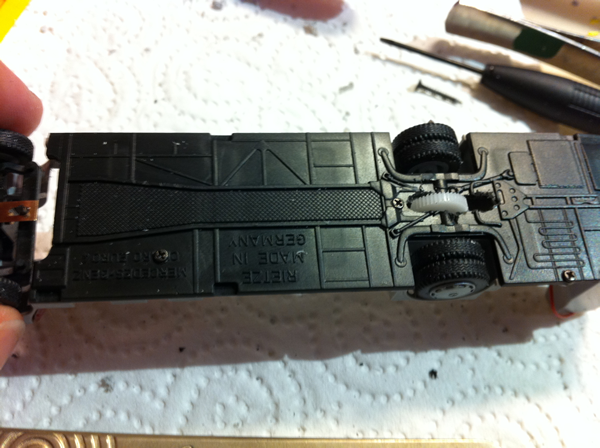
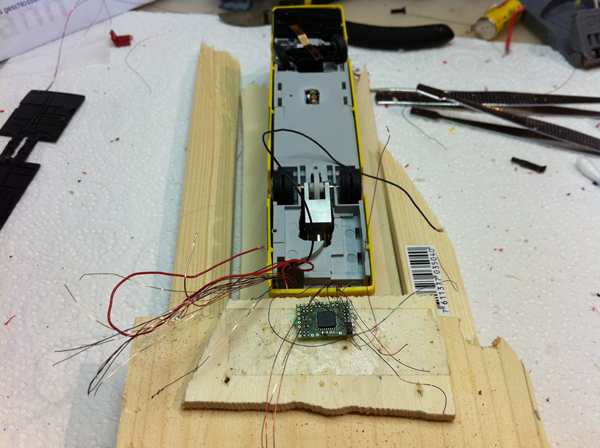
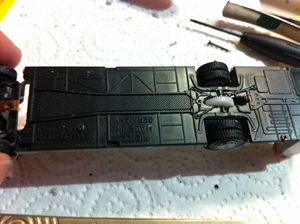
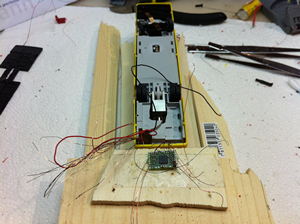
Für die ersten Tests ob die Lenkachse funktioniert wird der Bus provisorisch zusammengebaut. Die schwarze Grundplatte
wird jetzt für die Verschraubung vorbereitet und montiert. Diese soll später einfach weggeschraubt werden
können um einfach an die Elektronik heran zu kommen. Damit gewinnt das Fahrzeug auch an Stabilität. Die Elektronik
habe ich für den kleinen Hohlraum hinten vorgesehen.

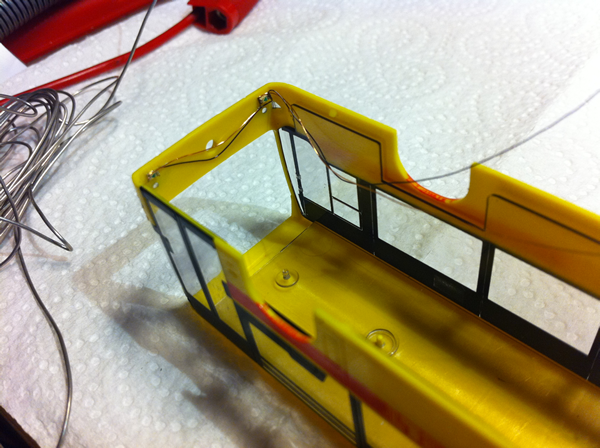
Nach erfolgreichem Einbau der Mechanik gehts jetzt an das Licht. Dafür gibts verschiedene Leds in X Bauformen.
Es gibt da auch Normgrössen wie Bauform 1401, 601 oder 401. Die 401 sind extrem klein und erfordern
entsprechends Werkzeug und Geduld. Glücklicherweise komme ich aber in meinem Bus mit der bauform 601
sehr gut zu recht. Einzig das Fahrlich vorne sind etwas spezielle Bauformen und extrem hell.
Es zeigte sich
später dass das Licht die IR Empfänger stören und musste das Licht mittels in Seriegeschalteten
Widerstand
dimmen. Das führte dann auch zu einem noch realistischeren Licht. Wichtig ist also dass dieser
Faktor beachtet
wird. Die Phototransistoren müssen vom Fahrlicht abgeschirmt werden oder man montiert
diese so dass das
eigene Fahrlicht
diese nicht beeinflussen kann.
Die Led werden nun mit Lackdraht verdrahtet. Da keine grossen Ströme fliessen kann sehr dünner verwendet
werden. Von Vorteil sind verschiedene Farben anzuwenden. Das DC Carsystem hat da Vorgaben die sehr gut funktionieren und
mit den entsprechenden Dokumentationen übereinstimmen. Rot zum Beispiel ist immer der gemeinsame Plus Pol.
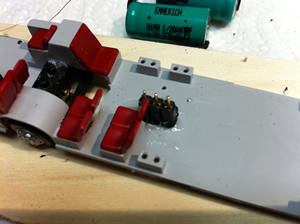
Auch das Cockpit muss angepasst werden. Aber imer so dass von aussen nichts zu sehen und die Stabilität
des Modelles nicht gefährdet
ist.

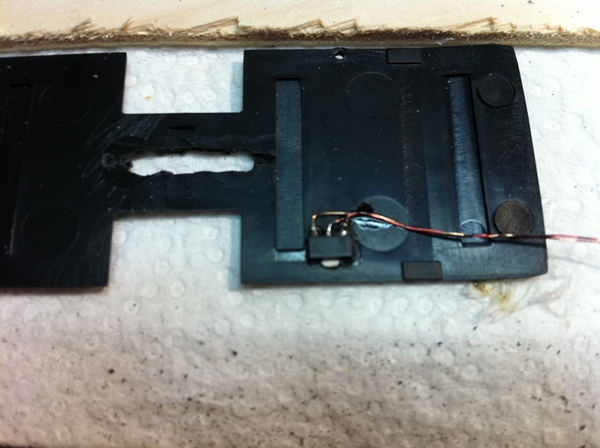
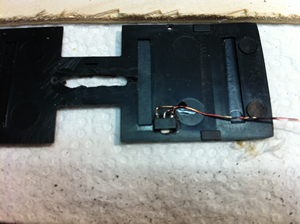
Jetzt wird der Platz des Hallsensors eruiert. Dieser muss auf der linken Seite des Fahrzeugs untergebracht werden.
Ein eingelegter Magnet in der Strasse auf der rechten Seite würde den Reedkontakt auslösen und so das Fahrzeug
ausschalten. In meinem Fall werden später die Magnete für das ausschalten nicht in der Strasse sondern mit Hilfe
eines Servoantriebes von der Seite her an das Fahrzeug geführt.
Dies wird im Berg passieren wo man nicht hinsieht.
Also eine Art Schattenbahnhof für die Fahrzeuge. Der Hallsensor wird nun hinten links gleich neben dem Decoder
platziert. Weiter vorne geht nicht da dort wiederum ein Magnet sitzt. Diesmal aber im Fahrzeug selbst. In der Strasse
werden Reed eingelegt die das Magnet des Buses detektieren und damit Funkttionen auslösen. Hier ist das Weichen-
stellen für in die Bucht gefragt.
Der Hauptschalter wird direkt neben der Buchse platziert. Bei der Verdrahtung wird der Schalter und die Buchse so
angeschlossen das bei eingeschaltetem Schalter die Buchse getrennt vom Akku ist. Bei ausgeschalteter Stellung
wird die Buchse mit dem Akku verbunden und dafür der Decoder vom Akku getrennt. So wird die Elektronik niemals
direkt mit dem Ladegerät verbunden. Normalerweise stellt dies kein Problem dar. Wenn es aber mal ein anderer
Akku gibt wie zum Beispiel LiPo, dann können Ladespannungen den Decoder beschädigen.
Nachdem nun alle Led vorverdrahtet sind und teils schon eingeklebt, werden nun die restlichen noch eingeklebt
bevor es jetzt an das wirklich knifflige geht. Die Drähte müssen alle im Bus möglichst unsichtbar verlegt werden.
Alle Drähte, ausser die der Seitenblinker, werden in einen relativ dünnen Schrumpfschlauch eingezogen und
am Dachhimmel entlang verlegt und verklebt. So ist es jederzeit möglich weitere Drähte einzuziehen
oder zu ersetzen. Die Anzahl Drähte habe ich klar unterschätzt und sah es kommen dass es sehr sehr
eng wird beim Decoder. Die roten Drähte führen den gemeinsamen Pluspol und können problemlos
zusammengeführt werden. Da das Modell im Dach 2 Deckel hat die im Original Lüftungen sind, habe ich direkt
unter dem vorderen eine Zusammenführung verlötet. Ich kann also später jederzeit nur den Deckel lösen und
habe so direkten Zugriff auf den Pluspol und Leitungsführung.
Wenn alles verdrahtet ist kann ich nun endlich das Chassis mit der Carosserie verheiraten und zusammenbauen.
Bei diesem Bild sieht man jetzt gut der Spalt zwischen Bodenplatte und Inneteil (grau) im hinteren Teil. Dort sind
nun auch alle Drähte herangeführt. Unten auf der Bodenplatte ist auch der Hallsensor zu sehen.
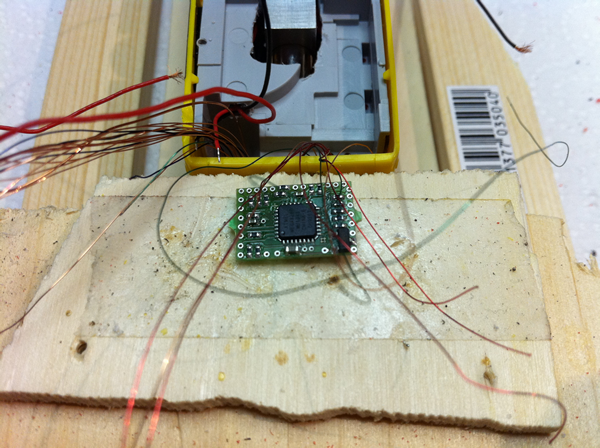
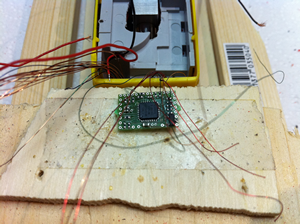
Jetzt der Decoder mit voller Konzentration verdrahten. Dafür sollte ein spitzer Lötkolben zur verfügung stehen.
Ich habe für diese Arbeit auch eine entsprechende Arbeitslupe mit Licht. Denn jetzt darf kein Fehler passieren
und gleichzeitig soll die Übersicht behalten werden. Platz dafür hat so gut wie keinen.
Am schluss der Bus zusammenmontieren respektive die Bodenplatte verschrauben und Fertig.
Nun der grosse Moment. Diese habe ich in Flashfilme festgehalten.
Weiter zu den Filme...